Thèses
Matthieu Delahaye (2023-) "Intelligence artificielle explicable et non biaisée : vers une compréhension et représentation des phénomènes de sécurité urbaine"
Encadrement : Philippe Lenca, Lina Fahed & Florent Castagnino
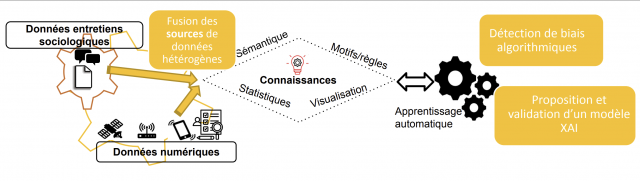
Récemment, le déploiement des modèles d’IA, souvent qualifiés comme boîtes noires, dans des secteurs sensibles tel que la sécurité urbaine a déclenché la nécessité d’explication pour tous les acteurs impliqués dans le processus d’aide à la décision de ces modèles. Ce projet de thèse rentre dans le cadre de l’amélioration de la réflexivité que les acteurs de sécurité urbaine peuvent avoir sur leur propre pratique en améliorant leur compréhension de l’évolution des phénomènes de sécurité urbaine. L’objectif principal de la thèse réside dans (i) la détection et la correction des biais pouvant survenir tout au long du processus de développement du modèle d’IA, (ii) la proposition d’un modèle d’apprentissage automatique pour la détection et la prédiction de l’évolution de ces phénomènes. Ce modèle doit être interprétable et explicable avec différents formats d’explications adaptés au contexte et aux connaissances du décideur.
Yann Jourdin (2023-) "Décision de groupe : modélisation, apprentissage et interprétabilité"
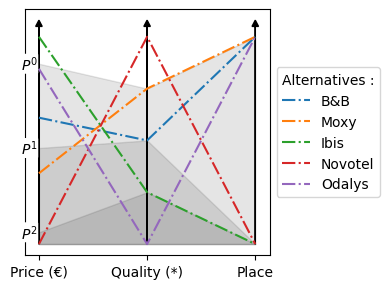
L'aide à la décision multi-critère vise à aider un décideur à prendre des décisions plus éclairées grâce à l'utilisation de modèles représentant ses préférences. L'objectif de cette thèse est d'adapter un modèle de préférence utilisant des profils de références (RMP) dans le cas où un groupe de décideurs doit trouver un compromis. Pour cela, ce problème est divisé en trois étapes : la première s'intéresse à la création d'une variante du modèle RMP prenant en compte la complexité des interactions entre les décideurs ; la seconde se concentre sur l'apprentissage de ce modèle à partir des préférences des décideurs ; et enfin la dernière porte sur la génération automatique d'une interprétation de la recommandation finale du modèle.
Joseph Thompson (2023-) "Intégration de méthodes d'apprentissage automatique dans des méta-heuristiques : un système de sélection-coopération d'algorithmes pour résoudre des problèmes d'optimisation combinatoire"
Matthieu Bachelot (2022-) " Fouille de données temporelles et hétérogènes pour la modélisation et la détection des informations fallacieuses"

L’objectif principal de ce projet de recherche est d’identifier les motifs récurrents accompagnant la propagation d’une information fallacieuse. Notre approche inédite se base sur des données en Français, en combinant différentes sources d'informations, à savoir des articles de presse en ligne et des posts Twitter. La première partie de la thèse porte sur la création et la validation du jeu de données en conduisant des analyses statistiques exhaustives, et de comparer ces résultats avec ceux de la littérature anglo-saxonne. Cela permet d'apporter les éléments déterminant pour la détection des informations fallacieuses via des méthodes d'apprentissage automatiques sur graphes. Ceci permettra de travailler sur la détection précoce de ces fausses informations, voir même la modélisation de la propagation d'information fallacieuse "générique".
Owein Thuillier (2022-) " Intelligence artificielle pour la configuration de réseaux de sonars multistatiques"

Bachtiar Herdianto (2022-) "Combiner Machine Learning et Matheuristiques pour des problèmes de logistique urbaine"
Dubon Rodrigue (2022-) "Simplification de l'architecture des réseaux énergétiques par agrégation de nœuds à base d'IA"
Le réseau de chauffage urbain facilite l'intégration des producteurs de chaleur renouvelable et permet un transport efficace de l'énergie avec un pilotage optimal. Pour profiter de ces avantages, il est nécessaire d'optimiser et de simuler le réseau, ce qui est coûteux en temps de calcul. Dubon a rejoint l'équipe du Lab-STICC DECIDE en octobre 2022. A partir de la formulation du réseau de chaleur sous forme de graphe connecté, dans sa thèse, Dubon étudie une nouvelle méthode pour réduire ce coût de simulation en agrégeant des nœuds consommateurs similaires en utilisant les architectures les plus récentes en Intelligence Artificielle. Son objectif est de développer deux modèles complémentaires : un modèle non supervisé pour identifier des nœuds consommateurs similaires et un modèle supervisé dépendant du temps pour apprendre la dynamique physique de ces nœuds consommateurs.
Erwan Alincourt (2022-) "Cartographie, détection d’anomalies et réaction suite à une détection sur des systèmes industriels : application aux navires militaires et civils"
Directeurs : Yvon Kermarrec et Philippe Lenca. Encadrant : CC Xavier.
Les bateaux modernes sont beaucoup plus performants que leurs ancêtres du 19e ou du 20e siècle. À l'instar des usines, ces améliorations ont été permises par la forte automatisation des systèmes. Ces systèmes, hybrides entre informatique et mécanique sont appelés systèmes cyber physiques. Les automates (ICS / SCADA) qui pilotent les machines, les systèmes de navigation, comme l'AIS sont quelques exemples de ces CPS. Comme tous les systèmes informatiques, ils sont vulnérables aux attaques cyber, mais un dysfonctionnement sur ces systèmes peut conduire à une catastrophe dans le monde réel. En outre, il est très difficile de modifier ces systèmes afin de les rendre "cyber by design". C'est pourquoi il est important de pouvoir détecter rapidement la survenue d'une attaque cyber sur ces systèmes. Plusieurs méthodes permettent de le faire : des bases de signature, des règles expert ou encore l'IA. Les questions de recherche identifiées à ce stade sont les suivantes : Quelle est la place de l'IA pour la détection d'attaque sur des systèmes cyber physiques des bateaux ? Comment évaluer les performances d'un algorithme de détection d'attaque cyber dans un contexte de CPS maritime ? Comment permettre au décideur de choisir l'algorithme ou la combinaison d'algorithme la plus efficiente dans ce contexte ?
Julien Mercier (2020-2024) "Apports et limites de la réalité augmentée géolocalisée pour l’apprentissage de la biodiversité"
Encadrants: Erwan Bocher, Olivier Ertz

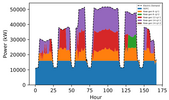
Antoine Mallégol (2020-2023) "Optimisation multi-objectif de systèmes énergétiques couplés"
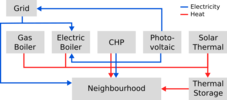
L'objectif du travail de thèse d'Antoine Mallégol est de proposer une méthode d'optimisation d'un système énergétique couplé, composé d'un réseau électrique et d'un réseau de chaleur pouvant interagir entre eux. Le principal défi de ce travail est la résolution d'un modèle complexe avec un long horizon temporel. Différentes méthodes de modélisation et d'optimisation sont proposées : programmation linéaire en nombres mixtes, heuristique, et métaheuristique. Une approche multi-objectif permet d'améliorer les coûts et l'impact environnemental du système.
Fred Gonsalves (2020-2023) "Fouille de données et aide à la décision pour la supervision et la prévision court-terme de l'efficacité énergétique d'un paquebot"
Intégré à l'équipe DECIDE du Lab-STICC depuis 2020 et à l'équipe ECORIZON des Chantiers de l'Atlantique depuis 2019, Fred Gonsalves mène une thèse centrée sur la réduction de la consommation énergétique et l'empreinte environnementale des paquebots de croisière. Les défis scientifiques de son travail comprennent l'intégration de données issues de diverses sources (capteurs, archives météorologiques, données fournies par les fournisseurs, etc.), l'application de techniques d'apprentissage automatique, la modélisation des systèmes et sous-systèmes constituant le paquebot, et le développement d'outils d'aide à la décision, du design à l'opération. Son travail s'effectue dans le cadre d'une thèse CIFRE, en partenariat avec l'IMT Atlantique et les Chantiers de l'Atlantique.
Quentin Perrachon (2020-) "Ordonnancement intelligent pour l'industrie du futur"
Quentin Perrachon est en thèse CIFRE dans le cadre d'une collaboration entre l'équipe DECIDE du Lab-STICC à l'Université Bretagne Sud et la société Herakles basée à Vannes. Herakles développe et distribue un logiciel ERP-GPAO et souhaite proposer un outil complémentaire proposant des solutions à des problèmes d'ordonnancement d'atelier de manufacture de petite à moyenne taille. Une modélisation générique est proposée pour résoudre les problèmes d'une grande variété d'industries, cette modélisation est basée sur le flexible job shop scheduling problem à laquelle est ajoutées plusieurs contraintes industrielles telles que par exemple des indisponibilité de ressource ou la nécéssité potentiellement partielle de ressources pour certaines opérations. L'objectif étant de ne maintenir qu'un modèle et outil capable de répondre aux demandes de différentes industries. Issue du domaine de la recherche opérationelle, des approches exacte et metaheuristiques basées sur des techniques de voisinages sont explorées et proposées pour résoudre ce problème.
Hadi M. Y. Khalilia (2019-) Génération de ressources lexico-sémantiques multilingues tenant compte de la diversité
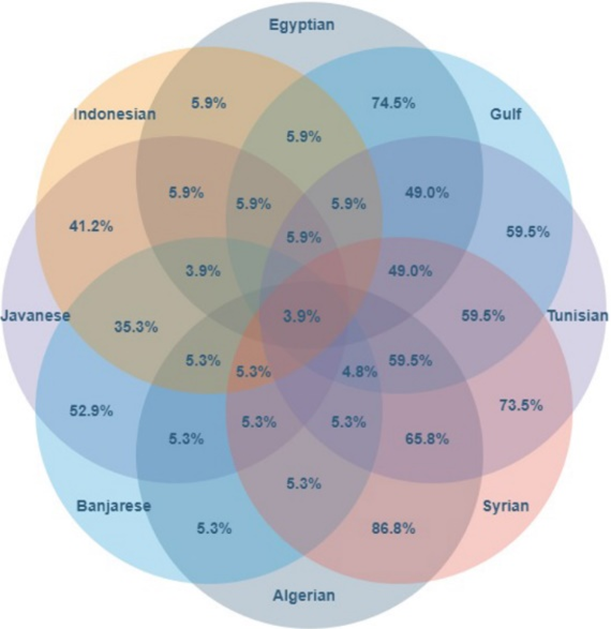
Les langues sont connues pour décrire le monde de diverses manières. Alors que les linguistes étudient depuis longtemps les phénomènes liés à la diversité lexicale, de tels résultats ne sont presque jamais utilisés dans les applications informatiques. L'objectif de la thèse est d'explorer ces phénomènes à travers les langues, et de proposer des méthodologies pour une création systématique et à grande échelle de ressources linguistiques informatiques liées à la diversité. Les méthodologies sont de nature hybride, impliquant la réutilisation de résultats existants issus de la linguistique, d'algorithmes automatisés, ainsi que de contributions de locuteurs natifs. Pour cette raison, bien que la thèse se situe principalement dans le domaine de l’informatique, elle est interdisciplinaire avec des éléments issus de la linguistique, de la science participative et de l’intelligence artificielle.
Kobina Piriziwè (2019-2022) "Nouvelles visualisations 3D collaboratives de graphes pour l'exploration de relations intra et inter communautés"
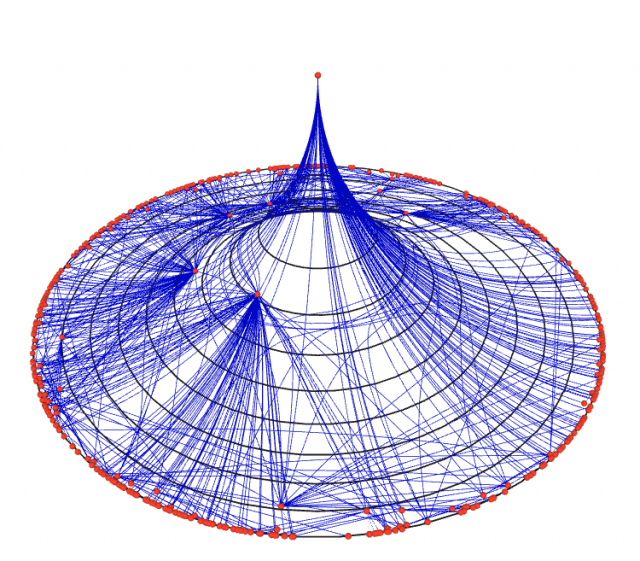
L’objectif de cette thèse était d’étudier les contributions de la visualisation 3Dimmersive par rapport à la visualisation classique 2D afin d’améliorer l’exploration et l’analyse des relations intracommunautés et intercommunautés représentées sous forme de graphes. Après une analyse de l’état de l’art sur la théorie des graphes et ses applications à l’analyse des réseaux sociaux et sur des méthodes de visualisation de graphes, nous avons proposé deux approches de visualisation de graphes : une visualisation exocentrique, qui permet à un utilisateur de manipuler un graphe comme un objet, pour permettre de visualiser intuitivement la centralité des nœuds et une visualisation égocentrique, spécialement adaptée à l’exploration d’un graphe en environnement immersif, où notre mécanisme de rétractation de l’espace d’affichage du graphe permet à un utilisateur d’avoir une vision d’ensemble du graphe tout en restant en mode égocentrique. Les applications de ces travaux sont tout aussi civiles que militaires.
Mohadese Basirati (2019-2022) "Zoning management in marine spatial planning : multi-objective optimization and agent-based conflict resolution"
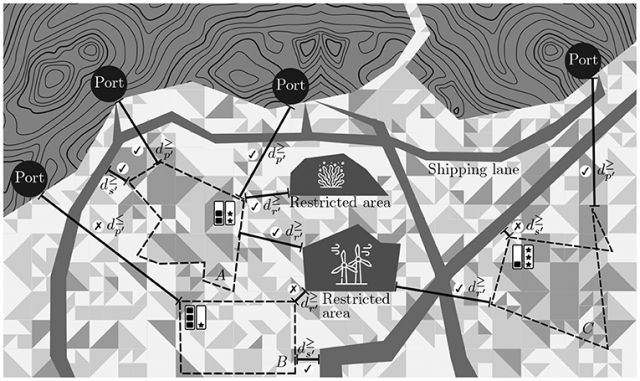
Le défi de cette thèse est de développer un système d'aide à la décision spatiale pour localiser et allouer des zones d'espace marin à de multiples acteurs, malgré des objectifs et des contraintes initiaux potentiellement conflictuels. Pour répondre à cette question, dans cette thèse, nous nous concentrons sur trois exigences différentes comme suit : 1) Modéliser le problème dans un cadre SIG réaliste et formuler un modèle mathématique pour le résoudre, 2) Être capable de proposer des solutions pour des problèmes à grande échelle, 3) Développer un processus de prise de décision qui aide les multiples acteurs à résoudre les conflits possibles en parvenant à un compromis. En fonction de ces objectifs, cette thèse propose un système multi-agents multi-objectifs (MOMAS) qui simule les processus décisionnels multi-niveaux de la gestion du zonage spatial des usages marins avec trois contributions principales : 1) Programmation linéaire en nombres entiers multi-objectifs (MOILP), 2) Algorithmes évolutionnaires multi-objectifs (MOEA), 3) Processus de décision coopératif avec des systèmes multi-agents (SMA) et des méthodes heuristiques. Cette thèse propose une approche formelle et exécutable pour traiter le problème de gestion du zonage de l'espace avec des objectifs et des acteurs multiples. En cas de conflit, différents scénarios de coopération sont comparés et classés. Les résultats expérimentaux sur des jeux de données synthétiques mettent en évidence le fait que de bons compromis peuvent être atteints lorsque les acteurs acceptent de coopérer. Les travaux proposés ouvrent la voie à de futurs outils d'aide à la décision en ligne appliqués à des cas réels.
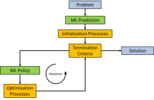
Maryam Karimi-Mamaghan (2019-2022) "Hybridizing metaheuristics with machine learning for combinatorial optimization : a taxonomy and learning to select operators"

Cette thèse intègre des techniques d'apprentissage automatique dans des méta-heuristiques pour résoudre des problèmes d'optimisation combinatoire. Cette intégration guidera les méta-heuristiques vers la prise de meilleures décisions et par conséquent à rendre les méta-heuristiques plus efficaces. Cette thèse, tout d'abord, fournit une revue complète mais technique de la littérature et propose une taxonomie unifiée sur les différentes manières d'intégration. Pour chaque type d'intégration, une analyse et une discussion complètes sont fournies sur les détails techniques, y compris les défis, les avantages, les inconvénients et les perspectives. Nous nous concentrons ensuite sur une intégration particulière et abordons le problème de la sélection adaptative des opérateurs dans les méta-heuristiques utilisant des techniques d'apprentissage par renforcement. Plus précisément, nous proposons un cadre général qui intègre l'algorithme Q-learning dans l'algorithme de recherche locale itérée afin de sélectionner de manière adaptative les opérateurs de recherche les plus appropriés à chaque étape du processus de recherche en fonction de leur historique de performance. Le cadre proposé est appliqué à deux problèmes d'optimisation combinatoire, le problème du voyageur de commerce et le problème d'ordonnancement de type flowshop de permutation. Dans les deux applications, le cadre proposé est plus performant en termes de qualité de solution et de taux de convergence qu'une sélection aléatoire d'opérateurs. De plus, nous observons que le cadre proposé montre un comportement d’état de l’art lors de la résolution du problème d'ordonnancement des flux de permutation.
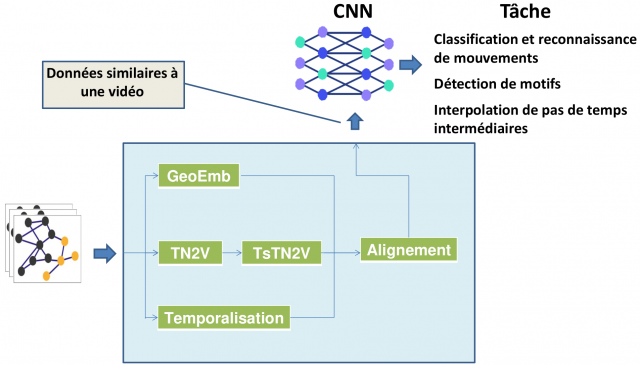
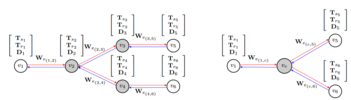
Mounir Haddad (2018-2022) "Embedding de graphes temporels : temporalisation de méthodes statiques et alignement".